
文|高工機器人
“人形機器人是ChatGPT的靈魂載體。”這種構想正在成為現實。
近日,某位工程師將 ChatGPT 和波士頓動力公司的機器狗Spot結合起來,使得Spot能夠和人類進行語音交流,還能通過點頭和搖頭來回應問題。
當今最先進的人工智能,搭配頂尖的機器人載體。在爆火的ChatGPT之外,另一主人公——波士頓動力,同樣值得關注。
事實上,波士頓動力是討論“人形機器人”無法避開的傳奇性企業,無論賽道怎樣風起云涌,新星層出不窮,波士頓動力產品始終是行業的標桿。無數挑戰者試圖對比、超越、但充其量只是一場越級的“碰瓷”。
從1983年第一臺蹦蹦跳跳的單腿機器人,到如今精通各種酷炫技能的“明星”Atlas。波士頓動力在40年發展中,將人類機器人夢想一步步照進現實,同時也屢屢掙扎在商業化困局,八年三易其身。
波士頓動力這家傳奇企業究竟是如何誕生的?身為技術最領先的企業之一,卻又為何屢屢被變賣?
在探尋答案的過程中,人形機器人甚至整個移動機器人產業,都能從其優勢與困境中映射自身,獲得啟示。
01、四十年潮起潮落
波士頓動力的發展歷程中有四個重要節點,在早期其為軍方服務,之后分別被谷歌、軟銀和現代汽車收購。
在不同的時間節點,波士頓動力持續推出了一代代驚艷的機器人作品。目前的核心產品有系統Pick、機器狗Spot、兩足機器人Atlas、和手柄Handle。
1、軍方合作:BigDog與Atlas的誕生
1992年,波士頓動力成立。
但早在1983年,創始人馬克·雷伯特就造出了一臺單足機器人。這臺簡易的機器人,雖然只有一條腿,只能在蹦跳移動,但平衡性極好,機動能力也很強。

后來,雷伯特又做出一個四足機器人,即BigDog的雛形。不久,雷伯特將主要從事研究與機器人相關的控制、機器視覺方面技術的CMU leg實驗室,從卡內基·梅隆大學搬到了麻省理工,逐漸孵化出波士頓動力的雛形。
起初,波士頓動力的主要服務對象是美國軍方,并獲得美國軍方超千萬美元的投資。在此期間,波士頓動力推出了許多產品,包括聲名大噪的四足機器人BigDog、阿爾法狗LS3、四足機器人Cheetah(獵豹)和可自由跳躍旋轉的Wildcat(野貓)等。
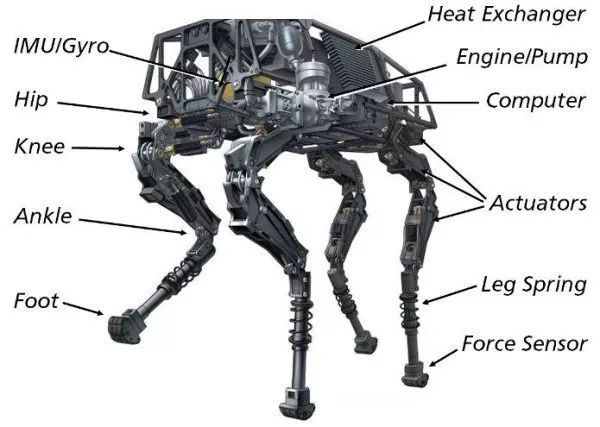
BigDog
BigDog在2005年左右面世,高度約為1米,重量約為109公斤,可以背負45公斤的重物進行自由行走或奔跑,最快移動速度可達6.4公里/小時。
在波士頓公司發布的宣傳視頻中,BigDog在裝載著重物的情況下,仍能對人類從其側面的腳踢做出靈敏的反應,不會被踹倒。在實際運用中,BigDog主要幫助美軍背負裝備、運輸物資。不過因為BigDog噪音太大,無法在戰斗中使用,項目只能中止。
petman
盡管項目中止了,但在美國軍方的支持下,波士頓動力開始重點投入對雙足機器人的研究工作,并從BigDog中改進出了一款人形雙足機器人Petman。經過一段時間研究后,2013年,由雙足機器人Petman迭代而成的Atlas原型機亮相。

Atlas初代機
初代Atlas專為各種搜救任務設計,身高近1.9米,重150公斤,身上還綴著一條電纜來外接電源。但它已經可以實現走路和跳躍等基本動作,遭重擊后能單腿站立。但當時的Atlas還要靠鋼纜輔助才能完成一系列動作。
2、谷歌階段:Atlas和Spot機器人的進化
2013年底,波士頓動力被Google以30億美元收購。由此,波士頓動力也中止了與軍方的合同。
進入Google 麾下后,波士頓動力繼續完善兩款重磅產品——人形機器人Atlas和Spot系列機器狗。
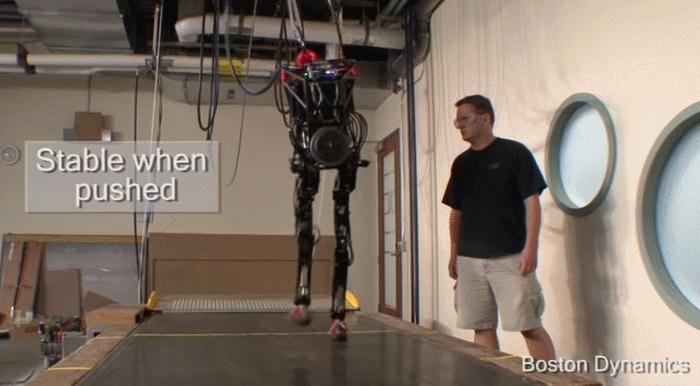
被收購第三年后,新一代Atlas終于正式亮相,但這一次大的改進是摒棄了傳統的接線供電,采用激光雷達和機器視覺實現了自主導航、定位和行走。

在此期間,波士頓動力推出了早期的Spot四足機器人。在公司發布的視頻中,相較BigDog,Spot實現了低噪運行,可以借助兩條肢體在原地跳躍而不摔倒,并且可以靈活上下樓梯。

Spot
之后推出的Spot Mini,重量僅為25公斤,比Spot更加小巧輕便,并在頭部增設了一幅機械臂,可以靈活操控物體。
盡管如此,本意強強聯合的Google,在對波士頓動力持續投入研究資金與科技資源后,發覺其尖端技術依然離落地變現有不小距離,在3年之后還是選擇將波士頓動力出售。
3、軟銀階段:商業化進程第一步
2017年,軟銀集團以不公布價格的方式,從Google手里拿到了波士頓動力控制權。
盡管沒有透露軟銀為公司提供了多少研發費用,但馬克·雷伯特表示,無論是Google還是軟銀,都為公司提供了充足的資金。
在充足的資金支持下,波士頓動力開始著力將研究成果進行商業化。波士頓動力CEO馬克·雷伯特曾在外媒論壇上表示,公司的發展有兩個策略方向,一是通過長期的投資,打造出人類夢想中的機器人;同時致力于打造機器人商品。
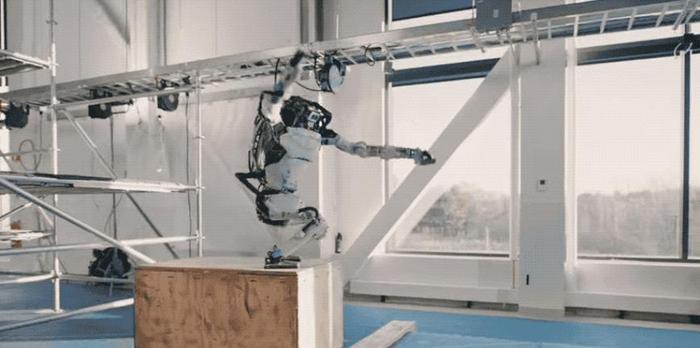
在打造人類夢想中的機器人方面,從2016年至2020年間,站在機器人研究金字塔尖的Atlas飛速進化,外表越來越酷炫。Atlas改用了鋰離子電池組,液壓驅動系統的具有強悍的負載能力,在保持穩定性的同時,體積也更小。

其技能的迭代肉眼可見,僅僅過去一年,比起在2016年走路還踉踉蹌蹌的樣子,Atlas的動作明顯流暢了很多,不僅能在臺階之間跳躍,甚至還能來個后空翻。2018年,Atlas學會了跑步,能跨越障礙物,一步步躍上寬闊的臺階。次年,它已經能連續跳躍、翻滾和倒立。
2020年6月,波士頓動力邁出了商業化的重要一步。Spot Mini 以74500美元,折合人民幣約50萬元的價格發售。在理想場景中,Spot Mini可應用于警署、石油公司、機場建筑工地、還能充當雪橇犬、牧羊犬。

Spot Mini
下半年,波士頓動力宣布四足機器人Spot進入加拿大、歐洲市場。波士頓首席執行官Robert Playter曾透露,截至2020年9月份,其已經出售或者租賃了250個機器人,而且銷售速度在增加。
4、現代汽車階段:人機協作的可能
但歷史在重復,同樣在三年后,波士頓動力被軟銀出售。2020年底,現代汽車集團以9.21億美元價格接手波士頓動力,直到2021年6月才完成收購。波士頓動力似乎受易主的影響不大,繼續發布了Atlas跳舞的視頻。

2022年9月,現代汽車和波士頓動力宣布初始投資超過4億美元,啟動新的波士頓動力人工智能研究所。這意味著波士頓動力或再將研發和產業化擺到同等位置。
如今,Spot已經正式走入現代汽車工廠,而Atlas也能靠自身傳感器感知環境,自主行動。除跑酷、跳舞,持續穿越臺階、跑過斜坡外,還能在工廠場景中協助工人一同辦公。 業界同樣猜測,波士頓動力會與現代汽車的智能出行業務結合起來,創造出類似變形金剛的無人駕駛智能車。

02、波士頓動力機器人厲害在哪?
“我愛機器人,我的長期目標是機器人像動物和人一樣運動自如。”
在雷伯特看來,要達到硬件、軟件以及運動行為三者的協調,才能達成其理想的機器人。簡而言之就是需具備三項能力:平衡性和動態運動能力、運動控制能力以及移動感知能力。
一個性能優越的足式機器人,能在任意地方、任何地形保持平衡,自由活動,并且可以靈活地操控物體,在移動的過程中輕松完成各項操作任務,同時可以感知空間中物體的穩定存在,有效避開障礙。
譬如從A點到B點的移動,機器人首先要對環境有一定的感知能力,從而規劃出一條合理的路線,使用運動控制算法測算出合理的“關節”力量配比。當機器人開始移動時還需要“關節”快速響應,準確完成預期動作。
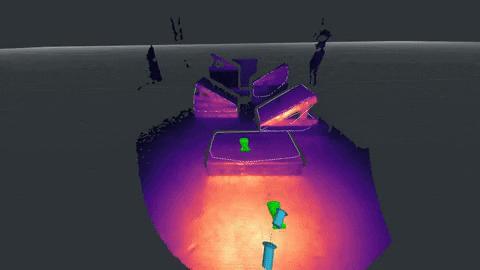
Atlas第一視角的路線規劃
當遇到障礙物時,還需要理解并考慮障礙物的屬性、質量和需要使用的“力”等。比如遇到一個塑料袋,不會將其判斷成一個實體。
波士頓動力的技術領域主要涉及液壓驅動和電液混合驅動、步態規劃、平衡控制、復雜地形動態規劃以及自我回正等運動控制技術,這些技術也保證了機器人具有較強的運動能力。
液壓驅動的難度在于,使用液壓系統的設備必須配備緩沖設備(蓄能器),加之整個液壓系統工作介質的壓縮性, 導致機器人模型的非線性程度陡然增加,仿真難度極大。
不過,液壓驅動的顯著優勢是其功重比非常大,響應速度快、控制精度高且具備極高的負重能力和爆發力。在同樣的空間內,用液壓元件所做的功是電機的數倍甚至是數十倍。如果說幾個電驅的機器人能拉動一輛卡車,那么一個液壓的機器人就能拉動一架中型飛機。
此外,僅在步態規劃方面,波士頓動力就曾申請許多專利。包括使用控制器控制閥適時進行開關動作,實現按需高功率或低功率模式切換;通過判斷關節承受的載荷類型和大小,以選擇適當的液壓或電動驅動器,使得機器人的功率消耗最低。這一系列的專利,都有助于液壓系統運行更加高效、減少功耗。

波士頓動力的產品先進性,除了依賴頂尖團隊及創始人的熱愛外,美國的機器人生態功不可沒。
從上世紀六七十年代起,美國就占據著全球機器人技術的制高點。
世界上最早的工業機器人Unimate(尤尼梅特)、第一臺帶有觸覺傳感器的機器人、第一個智能移動機器人——夏克機器人、全自動六軸關節機械臂——斯坦福機械臂都誕生在美國。
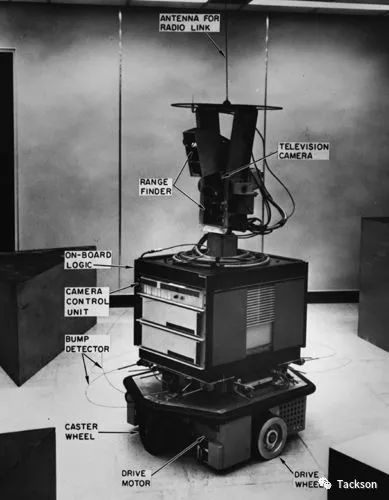
第一臺移動機器人Shakey
在高精技術的引領下,形成了美國機器人的四個創業創新公司聚集區,分別是硅谷、波士頓、匹茨堡和底特律。
其中,波士頓被稱為“人工智能”誕生地,其所在的馬薩諸塞州自工業革命起,便是美國制造業中心,更聚集了麻省理工學院、哈佛大學、塔夫茨大學、波士頓大學等諸多知名院校、以及雷神公司、寶麗來等新興科技制造公司。
在二戰中,憑借MIT的創新力以及區域制造力,波士頓成為了二戰期間美國最重要的軍事研發、制造中心之一,128公路沿途遍布實驗室,被稱為“科研一條街”。
良好的產業生態以及人文環境,在某種程度上成就了波士頓動力。一家科技新星的冉冉升起,永遠無法只靠單打獨斗,而是要整個產業生態的奠基、整條產業鏈上的協同。
高工移動機器人在與多位行業人士的接觸中,他們也都表達了對國內產業鏈不斷完善、升級的期冀。往往生態優先,才會有企業領先。
波士頓動力沿襲了美國精研技術之風,也同樣繼承了其弊端:學術與產業脫離,導致機器人規模化落地緩慢。
美國技術領先,在早期卻沒能采取積極的措施推動技術的產業化,導致工業機器人在市場應用中處于劣勢。
八十年代,隨著日本及西歐國家在高新技術領域的崛起,美國與日本在以汽車為首的制造業短兵相接,最終日本更勝一籌,于1980年躍居世界最大汽車生產國寶座。這一年,也被業界稱為“機器人元年”。
為扭轉劣勢,聯邦政府抓住機遇出臺了一系列政策法規,推動政府與大學的機器人研究成果向產業界轉移,例如著名的《拜杜法案》,為期十年的“戰略計算倡議”等系列法規。
這些政策成效顯著。1986年美國機器人產量為1984年的17倍,1990年達1986年的10倍。
但隨著全球化進程加速,中國、歐盟、日本、韓國等機器人技術崛起,美國的機器人地位也持續受到沖擊挑戰。
作為一個典型的學院派創業公司,波士頓動力也重技術發展而輕視了商業化落地,創始人雷伯特對研發機器人的追求勝于對盈利的渴望。他曾表示,“沒有經歷至少25年潛心研究的機器人產品,不足以商業化。”
因此,直到2020年,波士頓動力的商業化進程才正式起步。而商業化進程姍姍來遲是一方面,作為機器人技術的頂尖公司,波士頓動力的落地困境還有更深層次的原因。
03、人形機器人困境
弗若斯特沙利文預測,到2026年,全球人形機器人市場規模將達到80億美元;高盛預計,到2035年,在藍海市場情景下,人形機器人市場能夠達到1540億美元的規模。
與未來廣闊市場前景割裂的是,當前人形機器人公司的生存現狀頗有些慘淡。
波士頓動力三次收購,身價從2013年被谷歌收購時的30億美元,縮水至現在的9.21億美元。去年4月份,著名的本田阿西莫(ASIMO)機器人便正式宣布退役,結束了22年的職業生涯 。
如何找場景、實現大規模落地?這是擺在所有移動機器人企業面前的難題。
首先是價格。波士頓動力正式開售的Spot Mini,售價為52萬人民幣左右,據稱Atlas,售價則是200萬美元。
價格居高不下,主要來自零部件成本。據報道,人形機器人整體的自由度/關節數量通常為20個至50個,一個自由度對應一臺伺服電機,國外電機價格通常為5000至6000元,甚至上萬元,國產電機價格也在2000元以上。因此一臺人形機器人售價百萬美元并不鮮見。
如此高昂的價格,注定無法在C端大面積鋪開,因此波士頓動力主要的客戶群還是集中在B端。但B端用戶對于成本與價格的考量往往比C端用戶更加理性且嚴格。
波士頓動力機器人功能多樣,配置先進,堪稱當下機器人技術的“頂配”。但對于建筑或能源開采行業的用戶而言,他們所需要用到的只是其中的一個或幾個功能,性價比并不高,并且還有更廉價的替代方案。
具體到落地方面,更為尷尬的是,人形機器人的續航相當差。人形機器人能耗較大,波士頓動力的Atlas和Spot Mini,續航時約為90分鐘,而大部分雙足的人形機器人連續工作時間都在2小時以內。這樣的續航時間,顯然不能支持機器人真正深入工業場景工作。
因此,盡管Spot已相對廉價,但據媒體報道,在出售半年后,Spot也僅被賣出了大約400臺。而當機器人久久無法實現其商業價值,波士頓動力也只能迎來一次次被收購。

為促進人形機器人落地,近年來,聲名鵲起的特斯拉“擎天柱”、小米“鐵大”面向的都是C端個人消費者。“擎天柱”試圖將人形機器人的售價打到2萬美元以下,主要的措施就是以電驅替代液驅,實現人形機器人產品標準化、低成本和可量產。
不過電驅比起液驅,性能還有一定差距。有行業人士認為,只有將電驅提升至Atlas水平,并且機器人續航時間應達到3至10個小時。人形機器人商用才有望迎來爆發式成長。
只是市場注定會落后技術,而走在最前列的波士頓動力尤甚。放大來說,這是整個移動機器人行業的困境。
我國移動機器人盡管發展多年,市場廣闊,但大部分公司仍未實現盈利。不少專業人士的共同感受是,移動機器人盡管性能穩定,功能多樣,但放眼整個市場,還未找到它們合適的立足之地,距離市場放量還有一定差距。
盡管如此,波士頓動力無可替代的核心優勢仍是尖端技術,如今“機代人”趨勢不可逆轉,機器人市場的爆發可見曙光。而唯有堅持技術創新,才能在未來的市場里掌控先機。
“在過去的40年里,機器人技術已經取得了長足的進步,但我們還有很長的路要走。”馬克·雷伯特說道。
商業變現的危機仍在持續。但未來,波士頓動力仍致力讓機器人更智能、敏捷靈巧,更易用,也更像人。
