
文|至頂頭條 劉文軒
編輯|舞春秋
從機器人的發展歷程來看,讓門框機器人和“笨笨”成為現實也是遲早的事。
如果你看過《流浪地球2》,那你一定會被里面的機器狗“笨笨”圈粉,它不僅可以感知主人的情感,自己也擁有豐富的情緒,讓人很想在家里也養一只。除了“笨笨”,電影里一臺造型別致的“門框機器人”(Framer)也吸引了不少觀眾的目光,它不僅可以架槍輸出,還能加盾防御,安靜站在那里時就成了一個安檢門,它還可以潛入海底執行任務,幾乎無所不能。
盡管機器人早已是科幻電影的“常駐角色”了,但不難看出,制作團隊依然想打破人們對機器人的刻板印象。只是局限于當前的技術能力,想要在現實生活里1:1復制一臺電影里面的機器人,恐怕沒那么容易。但這并不意味著未來沒有可能,從機器人的發展歷程來看,讓門框機器人和“笨笨”成為現實也是遲早的事。
01 雙足機器人,離“門框”還有多遠?
波士頓動力在這幾年公開了不少Atlas雙足機器人的影片,比較有名的像是后空翻、跳舞、跑酷,還有最近在一塊模擬工地的區域幫忙搬運物品,每一次更新都能刷新人們對機器人的認知。
這些成果,源自人類對機器人最初的幻想,這可以追溯到15世紀末,達·芬奇繪制的一幅“機器武士”,這臺機器人依靠風力和水力驅動,但這在當時也只能停留在想象當中。
真正在現實世界登場的人形機器人,直到1928年才正式公開。當時,西屋電氣工程師Roy J. Wensley為了推廣一款名為“Televox”的變電站控制單元,他將Televox包裝成一臺名為“Herbert Televox”的機器人,在紐約的Level Club亮相。
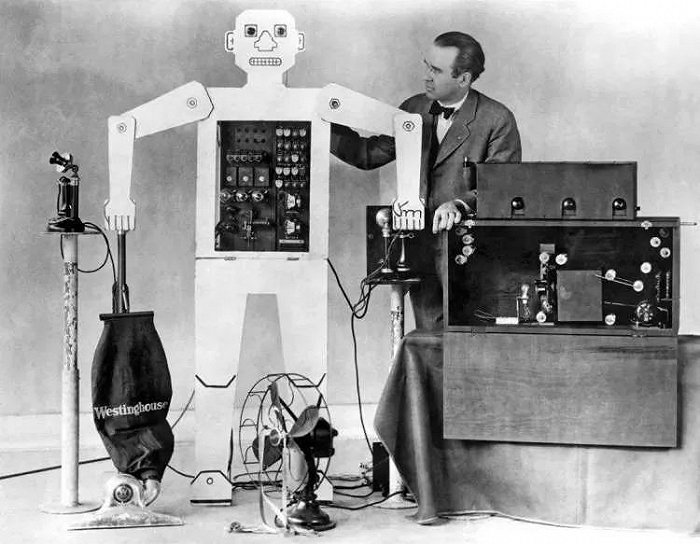
Herbert Televox
Herbert Televox的“本體”依然是Televox控制單元,它的一部分可以放在操控室,另一部分放在變電站內,利用音叉振蕩器產生不同頻率,當接收端的Televox收到頻率轉換成可解讀的編碼,并通過電話線將編碼傳輸到變電站,變電站根據編碼內容采取相應動作,實現遠程遙控。
至于Herbert Televox,如果以現代機器人的標準來看,它的外觀只能用“粗糙”來形容,一眼看過去也不過是一塊人形立牌,但是在功能上,它可以控制遠處的開關,的確也符合“未來仆人”這樣的描述。Wensley還為Herbert Televox設計了一個噱頭:在幾年喬治·華盛頓誕辰的那天,機器人為一幅華盛頓的肖像揭幕。
Wensley為控制單元取名字,還賦予它外形和性格的想法被視為一項創舉,使大眾對機器人有了一個更具體的概念。
不過真正能夠行走的雙足機器人直到40多年后才能看到端倪。1971年,日本早稻田大學教授加藤一郎研發出的WAP-3是世界第一臺三維雙足機器人,可以靜步行走。WAP-3為機器人的開發奠定了基礎,加藤一郎也被譽為“世界人形機器人之父”。
我國第一臺登上媒體的雙足人形機器人是由國防科技大學在2000年公布的“先行者”,這臺身高140厘米的機器人,能夠以1秒2步的速度行走,突破了我國雙足步行機器人只能6秒1步的紀錄。
和日本本田公司在同一年公布的ASIMO相比,先行者雖然外觀簡陋,但它所搭載的收音與發音能力,也在當時為人機交互模式帶來更多靈感。
不過當時對雙足/人形機器人研究最為矚目的依然是日本,2003年,豐田推出的“Toyota Partner Robot”能夠演奏樂器;2011年,本田推出的All-New ASIMO已經可以利用傳感器避障,手指也十分靈活,具備基本的行動能力。

Toyota Partner Robot
在這之后,再一次讓人們頗為震撼的雙足機器人,就是波士頓動力2016年2月公布在官方YouTube頻道的Atlas。影片展示了Atlas在地面上行走、開門,然后在戶外的雪地中行走,并且可以很好的調整重心,不會摔倒,搬運貨物也得心應手,摔倒后可以恢復站立狀態。

波士頓動力的Atlas雙足機器人
這段標題為“Atlas, The Next Generation”的影片很快登上各大媒體的版面,盡管《華盛頓郵報》評價它像“喝醉了的鋼鐵俠”,卻依然沒有減少它帶給人們的震撼。在這之后的發展我們也有目共睹,官方持續公布Atlas的最新能力,像是后空翻、跳舞、在模擬工地搬運物品等等。但遺憾的是,Atlas至今尚未商業化,而第一款商業化的雙足機器人是Agility Robotics在2020年推出的Digit,售價25萬美元,主要用途也是倉儲、工業等場景。
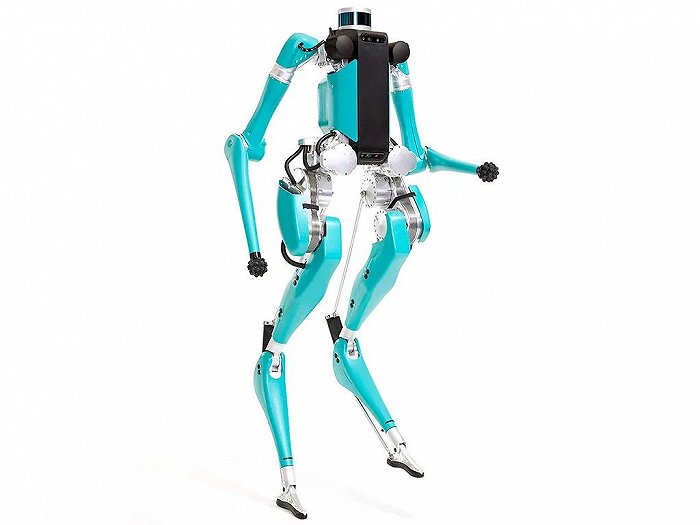
Agility Robotics的Digit機器人
不過有一個好消息是,埃隆·馬斯克的特斯拉Optimus機器人未來也許會成為你家里的幫傭。他曾在去年9月預言,未來這臺機器將可供家用,包括做晚餐、修剪草坪、照顧長者,甚至成為人類的“伙伴”,甚至成為性伴侶。
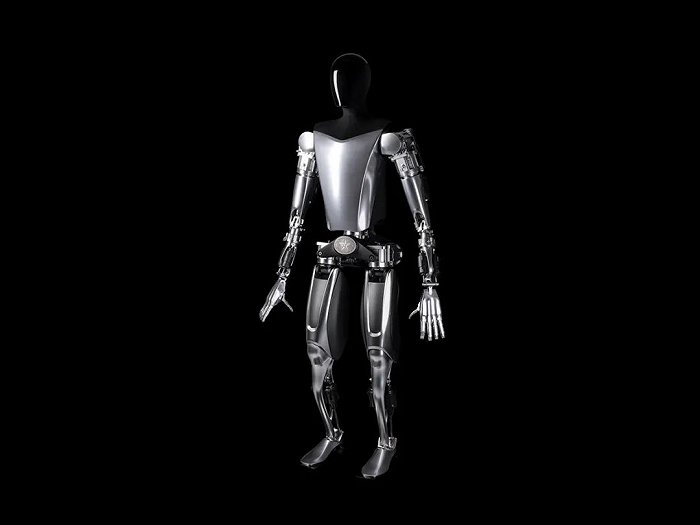
特斯拉Optimus機器人
稱贊Optimus的同時,馬斯克當然也不忘貶損一下競爭對手。他表示,目前的人型機器人都“沒有腦子”,它們沒有自行解決問題的能力,且造價非常昂貴,創造的價值卻很低。
不過機器人專家Christian Hubicki在Twitter上對Optimus給出了不太一樣的評價,盡管他稱贊在沒有對機器人采取安全措施的情況下進行現場演示的做法很大膽,但他也強調這款機器人的可靠性有待觀察。
Optimus可望在未來成為離我們日常生活最近的機器人之一,那“門框機器人”什么時候才能走進現實呢?像“門框機器人”一樣功能豐富的雙足機器人,以目前的技術水平恐怕還很難實現,其中最難攻克的也許就是電池技術了,能夠支撐如此多變的形態,需要更先進的高能量密度電池。
不過好在有電動車浪潮的驅動,能量密度更高、更安全的固態電池技術已經成為各大電動車廠商競逐的陣地,甚至有廠商發表在“2030年之前,將固態電池應用到量產的車輛上”這樣的豪言壯語,但電動汽車電池廠商StoreDot CEO Doron Myersdorf認為這不可能實現,因為讓固態電池量產還需要十年左右的時間,更實際的做法是采用半固態電池,目標是到2028年實現大規模生產。
不論電動汽車還是機器人廠商,攻克電池與充電技術都將為產品的升級迭代提供有力支撐,這個過程,也需要我們付出更多的時間和精力,相信有一天,我們會看到門框機器人那樣,或同樣級別的機器人設備出現在日常生活當中。
02 四足機器人,已無限接近“笨笨”
比起門框機器人,《流浪地球2》當中的機器狗“笨笨”看起來更容易實現,因為我們在過去幾年已經看過許多行動靈活的四足機器人,其中最有名的當然就是波士頓動力的Spot。
相比Atlas,Spot的“成長”速度快多了,這款機器人早在2019年就已經成為商品。這的確也可以理解,至少在掌握平衡方面,有四條腿總比兩條腿要容易一些,但事實真的如此嗎?
其實四足機器人同樣經歷了漫長的發展過程。世界上第一臺有記載的四足機器人是Chebyshev在1870年設計的一臺器械,它擁有四條腿,通過對角線的連接分成兩組,它只能進行簡單的站立、行走和奔跑,但無法適應復雜的地形,所以只能在平坦的表面上行動。
在這之后,L.A.Rygg在1893年申請了一項可騎行的四足機器人的專利,這臺機器人的動力來自騎手腳下的踏板,結合連桿和曲柄的聯動,使它能夠行走。
到了20世紀,南加州大學的R.McGhee與A. A. Frank在1968年共同研究了一臺名為Phony Pony的四足機器人,由電機驅動,能夠利用控制系統讓機器人行進,或是慢速的奔跑。
Phony Pony
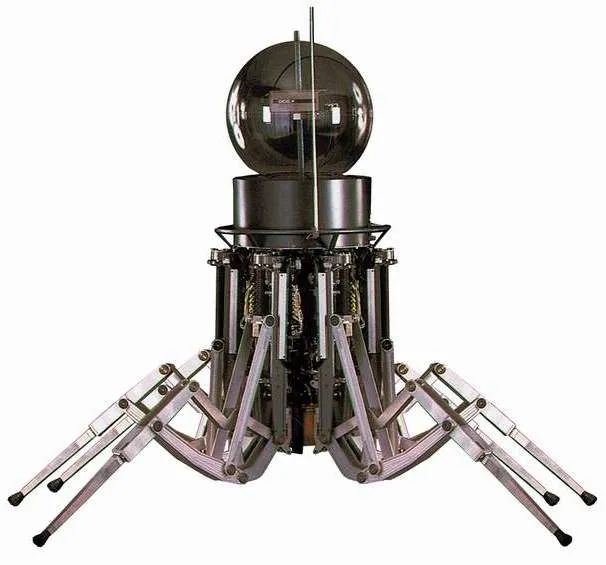
在這之后McGhee研究了更多機器人,其中包括誕生于1977年的六足機器人OSU。OSU被視為行走機器人歷史上的重要里程碑,也是第一臺由電腦控制的行走機器人。到了1986年,McGhee還與Waldron一起打造了ASV六足步行機,具有很好的地形適應能力。
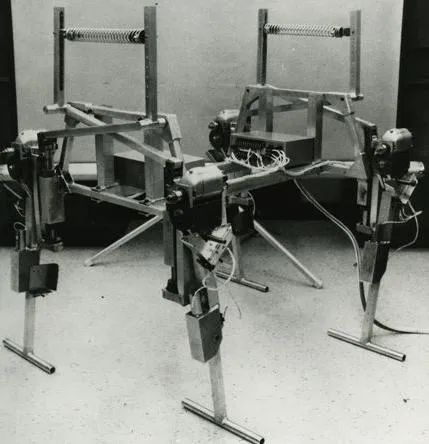
這段時間以來,日本的研究人員也正著手于四足機器人的研發,其中比較有名的就是東京理科大學教授廣瀨茂男與機器人專家梅谷陽二在1982年研究的PV-II,這臺10公斤重,1米高的機器人能夠上下樓梯、在凹凸不平的地面行走,同樣具有里程碑意義。

PV-II
而四足機器人的商業化早在20世紀80年代就已經出現了,1983年,Odetics公司推出ODEX-1,這是一臺六足機器人,后來的迭代版本也被用于一些工業場景。
ODEX-1
不過到這時為止的四足機器人都屬于靜態穩定系統,麻省理工學院教授Marc Raibert在1986年開發了第一臺能夠行走和奔跑并且完全動態穩定的四足機器人,先從單腿的動態穩定入手,再應用到設備上。Raibert在1992年創辦了波士頓動力,這之后我們也看到了BigDog、LittleDog、AlphaDog、Cheetah Robot、RHex Rough、WildCat等四足機器人的問世,還有2015年2月在YouTube公開的Spot,以及在2017年11月公開,擁有更精致外觀的新版Spot。
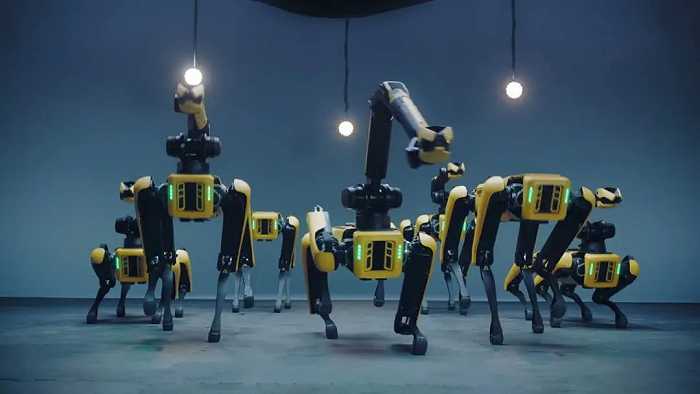
波士頓動力的Spot機器人
和Atlas一樣,波士頓動力先公布了幾段影片來介紹它具備怎樣的能力,像是奔跑、傳遞物品、開門、上下樓梯、跳舞、拖拽卡車…… 直到2019年9月24日,Spot的第一部廣告片公開,波士頓動力正式將這條“大黃狗”商業化。
像Spot這樣的四足機器人,主要面向工業場景使用,而且使用起來也需要較高的技術門檻,主要功能也是執行人類設定好的動作,工具屬性很強,放到日常生活當中,這種造型也非常不友善,很容易嚇到別人。
《流浪地球2》里的“笨笨”更像是Spot與陪伴型四足機器人(如索尼Aibo)的結合體,在工具屬性的基礎,加一點點娛樂屬性,不僅可以幫助人類完成任務,還可以感知人類情感,同時能夠表達各種情緒。想要實現這些功能,只需要結合一定的人工智能技術與相應的傳感器就可以實現了,而這些技術在目前已經具備一定的成熟度,而且有廠商推出過結合實用與娛樂兩種特質的陪伴型四足機器人。
總部位于加州山景城的Koda打造的同名機器人,能夠像真實的狗一樣與人類互動、在家中自由行動,可以提供陪伴、導盲,或是護衛等工作。相比Spot,Koda的造型比較圓潤,如果把它視為一種“家用電器”的話,這外觀也算得上“百搭”,但強烈的金屬質感,反而帶給人一種冰冷的感覺。

Koda
電影中圖恒宇的“笨笨”也是充滿機械感的造型,但與其他機械狗不一樣的地方是,它恐懼死亡,還會違抗命令,似乎擁有自我意識。在人工智能領域,這一直是頗具爭議的點。去年,Google工程師Blake Lemoine因為公開主張人工智能LaMDA具有自我意識,而引發廣泛爭議,但Lemoine的觀點也遭到科學家們的反駁,認為LaMDA只是一個運算能力較強的聊天機器人。
那“笨笨”是一個怎樣的存在呢?想要在現實世界完整復刻一臺“笨笨”,恐怕要先考慮一個更為復雜的問題。
各式各樣的人工智能已經滲透到我們數字生活中的每一個角落,未來的雙足/四足機器人勢必也會在不同程度上搭載人工智能技術,這意味著,我們遲早要面對這背后的倫理問題。當你在波士頓動力的影片中看到工作人員用力推倒Atlas、Spot的時候,出于人性的本能,你可能會對它產生一絲同情。
當一臺機器人的表現越來越接近真實的人類或動物,那么它們是否已經開始產生自我意識了呢?科學家和一般人的判定也許會很不一樣,但如果這一天真的到來了,科學問題將變成倫理問題,到時候人們的觀念,甚至法律都要跟著改變了。