
文|智駕網 黃華丹
行泊一體已經火了一段時間。
近期,又有多家企業先后發布基于單顆國產SoC的低成本行泊一體方案,進一步為該功能在中低端車型上的配置提供了條件。
所謂行泊一體,通俗而言就是將智能駕駛與自動泊車功能集成在一個域控制器上。相較于此前行車和泊車分別開發的模式,其優勢是傳感器等硬件復用可大大節約成本,同時軟件配置更加靈活,功能迭代開發效率也可有效提高。
有業內人士向智駕網表示,行泊一體是以產品驅動的開發,兼顧了功能體驗和成本。一方面,將兩套系統整合為一體,可降低約50%的成本,這對車企有著極大的吸引力。
同時,行泊一體比行泊分離的功能上限更高,在功能體驗方面也有明顯的提升,對于希望為消費者提供更好體驗的車企來說,行泊一體也是更好的選擇。
這是當前行泊一體廣受車企追捧的主要原因。
不過,在實際開發過程中,要真正做到行泊一體并不容易。
01.行泊一體的優勢與挑戰
走在行泊一體量產前沿的自動駕駛科技公司Nullmax紐勱科技創始人兼CEO徐雷將行泊一體分為4種形態。
1.0形態即是目前大部分車型采用的行泊分離的模式。兩種功能分別由行車域控制器和泊車域控制器控制,同時,行車功能只能調用行車的芯片和傳感器,泊車功能只能調用泊車的芯片和傳感器。
2.0形態則是將分別行車和泊車兩套系統的兩塊SoC集成在一個域控制器中,可減少一套域控制器的成本。但由于兩套系統并沒有做到真正的資源共享,對于性能的提升影響并不大。
3.0形態是在2.0基礎上,再減少一塊SoC,將兩套系統集成在一塊芯片上。但傳感器仍然分為兩套。
4.0形態則是真正做到單個域控制器,單個SoC,傳感器與芯片深度復用,真正實現行泊一體化。

同樣,在自動泊車技術上頗有建樹的縱目科技也提出將行泊一體分成三個架構。1.0架構是兩套系統共用一個域控制器,2.0是深度復用芯片與傳感器,3.0則是面向大算力平臺,完全由軟件框架拉通各個場景,場景驅動,架構統一。
也就是說,真正做到行泊一體的方案可以實現一套軟硬件即可控制行車和泊車的功能。
系統整合可大大降低成本,這使得在15萬元以下車型上覆蓋功能更加完善的智能駕駛成為可能。同時,由于行泊一體化將兩套系統整合為一套,也可大大提高開發效率,并進而縮短開發周期。
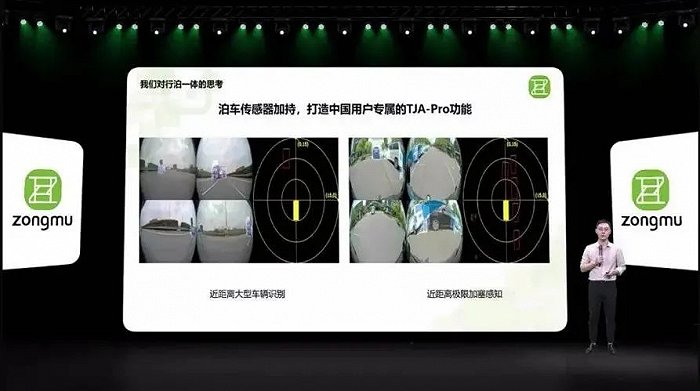
此外,行車與泊車的傳感器共用也可提升駕駛體驗。例如泊車功能可使用行車傳感器,而低速行車如緊急加塞等場景也可使用泊車傳感器。
對用戶而言,不僅用車成本降低,同時車輛的智能化體驗也將明顯提升。
當然,要在單顆SoC上實現兩個體系的功能,其挑戰之大也不言而喻。上述業內人士向智駕網表示,對企業而言,開發行泊一體,不僅需要具備泊車、行車功能的開發能力,如對應的感知、規劃等軟件算法,還需要具備將兩類功能整合成一套可部署方案的能力,如軟件算法架構的設計、異構式平臺的資源分配調度等等。這代表著企業需要具備非常深厚且完善的自動駕駛量產開發能力,要求很高。
但由于其所能帶來的明顯的好處,行泊一體已逐漸成為車企的共識。
02.行泊一體已成共識
據佐思汽研數據,2022年1-9月國內乘用車L2及L2+級ADAS裝配率達到33.5%,其中L2級為28.4%;L2+級(高階輔助駕駛)為5.1%。
而據蓋世汽車研究院《智能泊車產業報告》,2022年中國乘用車智能泊車系統滲透率為21.2%。
高工智能汽車研究院監測數據則顯示,2022年中國市場乘用車前裝標配搭載行泊一體域控制器交付上險為77.98萬輛,同比增長99.63%,搭載率目前為3.91%,處于市場爆發前期。
目前,大部分配備智能輔助駕駛的車輛仍采用行車和泊車分離的模式。據佐思汽研,目前,行泊一體上車主要車型有小鵬P7/P5、理想L9、坦克500、智己L7、榮威RX5、寶駿e300/Plus、吉利星越L、燃油車江淮思皓QX NOP版等。
但開發行泊一體方案的廠商已達20家左右,以國內廠商占主導地位。
根據企業性質的不同,基本可以分為以福瑞泰克、易航智能、智駕科技MAXIEYE、宏景智駕等為代表的初創型自動駕駛供應商,以德賽西威、東軟睿馳等為代表的傳統汽車電子頭部企業,以及華為、百度等互聯網巨頭。
03.高性價比小算力芯片是主流
而在行泊一體方案芯片的選擇上,德州儀器的TDA4是早期兼具性能與成本優勢的優秀代表。
以當前已經量產的TDA4 VM為例,算力8TOPS,支持深度學習和實時圖像處理,功耗5-20W,無需主動冷卻,同時可支持800萬像素的攝像頭接入。
包括百度、大疆、Nullmax、福瑞泰克、知行科技等多家自動駕駛科技公司選擇了將TDA4作為行泊一體解決方案的芯片。
業內人士認為,低算力芯片雖然體驗相對大算力會弱一些,但基本的行泊車功能都能實現,對車企來說是性價比非常高的選擇。同時,在整個消費市場中,車型最多、銷量最大的是經濟的入門車型和中檔車型,因而,針對中低端車型的行泊一體方案,必然會成為一個極其巨大的市場。

大算力芯片的行泊一體,能夠探索更高級的功能,適合高端定位的車型。在這個市場,英偉達Orin仍是主流的選擇。例如,德賽西威的IPU04就是使用了Orin。同時,Nullmax也將推出一款基于以Orin為代表的大算力芯片打造的行泊一體產品。
據Nullmax表示,該行泊一體項目可涵蓋高速、城市和泊車的全場景量產應用,提供導航輔助駕駛、擁堵跟車、泊車輔助、常規ADAS等主流功能,預計2023年將實現量產。
而日前,宏景智駕剛剛宣布與安霸達成生態戰略合作關系。宏景智駕將搭載安霸的CV3-AD系列SoC芯片,開發高算力汽車自動駕駛域控制器平臺,并配備宏景智駕量產級感知、行車和泊車規控算法軟件,為客戶提供高等級自動駕駛解決方案。
安霸也成為行泊一體芯片玩家之一。
此外,國內智能駕駛芯片主流的地平線征程系列也是行泊一體方案的不二選擇。有多家公司近期發布了基于單顆征程3或征程5的解決方案。
04.賽道已經擁擠
智駕網整理了部分主流行泊一體產品供應商的數據,可以看出,在芯片選擇上,德州儀器的TDA4和地平線的征程3是使用最多的。而在大算力芯片上,則是征程5和Orin占主導地位。

其中,禾多科技在2022年12月宣布基于地平線征程系列的“行泊一體”自動駕駛域控制器HoloArk。官方表示,已經在2022年獲得奇瑞等多家中國頭部自主品牌車企的定點,預計在2023年量產裝車。
根據算力不同,HoloArk分1.0和2.0兩個版本,功能覆蓋L2+到L4級的高階自動駕駛系統。HoloArk 1.0基于兩顆地平線征程3芯片打造,可支持高速領航、HPA記憶泊車等高階自動駕駛功能,將于2023年率先量產。HoloArk2.0基于征程5芯片打造,預計在2023年底或2024年初量產交付。
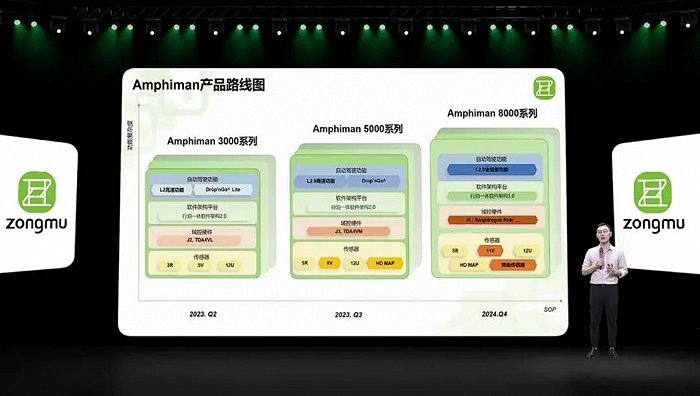
縱目科技推出的Amphiman系列同樣以地平線征程系列和TDA4為主,根據配置不同可實現包括高速NGP、一鍵泊車、智能召喚等功能,Amphiman 8000據稱將可實現L2.9級別的全場景功能。
Nullmax的MaxDrive根據配置不同有輕量版、基礎版、標準版和增強版之分,基于不同算力平臺,可實現不同級別的行泊一體功能。基礎版同樣以TDA4等低算力平臺為主,增強版則采用了Orin芯片。
而日前,德賽西威則在披露投資者關系時表示,公司IPU04產品已經在理想、小鵬等車型上進行量產,累計獲得超過10家主流車企的項目定點,并已進入量產規模爬坡期。
域控制器的融合是趨勢,而除了行泊一體,目前也有另一條路線是艙泊一體,即將泊車功能融合到智能座艙域控制器中。這是由于智能座艙的發展使得其算力有了富余,而座艙域支持接入傳感器也為泊車提供了可能。
不過,由于行車、泊車同屬駕駛類功能,系統架構更加相似,同時,行車和泊車在車企中同屬一個體系,功能安全也相對一致,目前行泊一體的路線更加主流。
而在未來,除了行泊一體化發展,艙駕融合也成為域控的趨勢,已經有包括英偉達Thor,高通Snapdragon Ride Flex在內的多款大算力芯片可支持艙駕一體的需求。
行泊一體,可以說是邁出了艙駕一體化的第一步。