
編譯 | 智東西 程茜
編輯 | 心緣
智東西5月7日消息,近日,英國劍橋大學的研究人員訓練一個廚師機器人不斷“咀嚼”并品嘗食物,以此來模仿廚師的烹飪過程。一道美味菜肴的誕生,依賴于廚師在烹飪過程中不斷品嘗味道、增減調料,在這個過程中,味覺就是人們判斷食物味道的重要指標。
讓機器人也能“邊品嘗邊烹飪”,這雖然聽起來有些荒誕,但該論文的第一作者、劍橋大學工程系的Grzegorz Sochacki說:“我們希望機器人能夠理解味道的概念,這將使它們成為更好的廚師。”研究人員開發(fā)了一個裝有基于電導的味覺傳感器的UR5機械臂的實驗裝置,通過混合食物模擬咀嚼、電流傳導復現(xiàn)鹽的味道,幫助機器人品嘗食物的“味道”。
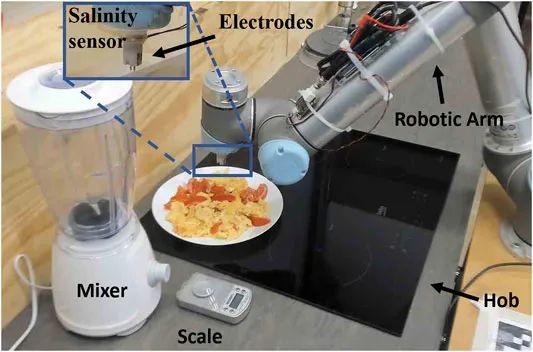
▲研究人員的實驗裝置
因此,經(jīng)過訓練的機器人“廚師”可以在咀嚼過程的不同階段品嘗食物的鹽度,并將所含鹽度的信息生成數(shù)據(jù)發(fā)送給計算機,然后生成可視化的味道數(shù)據(jù)圖像。
該論文標題為Mastication-Enhanced Taste-Based Classification of Multi-Ingredient Dishes for Robotic Cooking(《面向機器人烹飪的基于咀嚼增強味道的多成分菜肴分類》)已于5月4日發(fā)表在瑞士開放存取出版商Frontiers旗下的機器人學術期刊Frontiers in Robotics &AI(《機器人與人工智能前沿》)上。鏈接:https://doi.org/10.3389/frobt.2022.886074
01.邊攪拌邊品嘗,模擬人類烹飪過程
烹飪是機器人自動化領域的難題之一,多個研究人員參與研究了烹飪的不同自動化環(huán)節(jié),包括通過視覺反饋控制機器人煎香腸的時間、遠程操作機器人裝飾蛋糕、用機械臂裝載洗碗機等。
也有研究人員使用“電子舌頭”來幫助機器人檢測肉類等,但這個過程往往需要切碎、分離或與酒精混合等復雜過程,才能使得“電子舌頭”發(fā)揮作用,而機器人廚師和人類廚師在烹飪過程中最大的區(qū)別是人類廚師可以在烹飪中“邊嘗邊做”。
因此,現(xiàn)有的解決方案對于機器人“廚師”來說不夠及時。該論文的共同作者、劍橋大學工程系博士Arsen Abdulali說:“目前的電子測試方法只從均質樣本中獲取一個快照,因此我們希望在機器人系統(tǒng)中復制更真實的咀嚼和品嘗過程,這應該會產(chǎn)生更美味的最終產(chǎn)品。”
事實上,人們在咀嚼食物時,會品嘗到其味道和質地的變化,例如,在夏天當我們咬一口新鮮番茄,番茄就會釋放汁液,再加上人類咀嚼時釋放的唾液和消化酶,就會改變我們對番茄味道的感知。研究人員該論文的第一作者、劍橋工程系的Grzegorz Sochacki說:“大多數(shù)家庭廚師都會熟悉邊吃邊吃的概念——在整個烹飪過程中檢查一道菜,以檢查口味的平衡是否正確。
如果機器人要用于食物準備的某些方面,重要的是他們能夠‘品嘗’他們正在烹飪的東西。”劍橋大學的研究人員發(fā)現(xiàn)邊品嘗邊烹飪的方式能提高機器人快速準確地評估菜肴咸味的能力。因此,研究人員訓練其機器人裝置品嘗不同的西紅柿炒雞蛋,在咀嚼過程的三個不同階段品嘗九種不同的炒雞蛋和西紅柿,然后產(chǎn)生了不同菜肴的味道數(shù)據(jù)圖像。
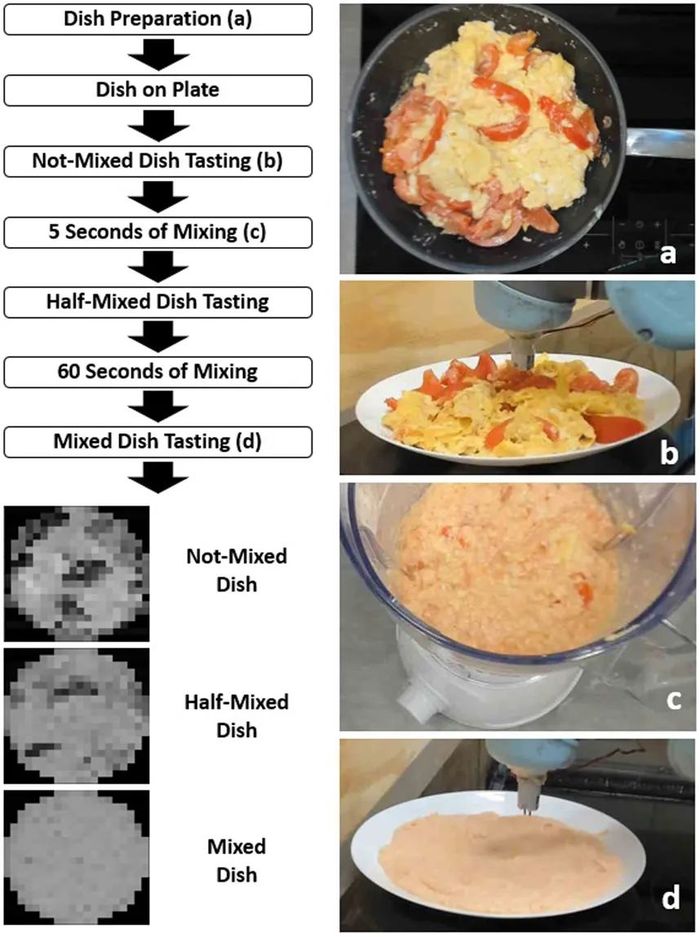
▲實驗過程
他們的研究結果可能有助于開發(fā)自動化或半自動化的食物制備,它可以幫助機器人學習什么味道好,什么味道不好。
02.9份菜各品嘗3次生成可視化味道圖像
再現(xiàn)人類的咀嚼過程還可以提取更多咀嚼過程中的信息。研究人員稱,在食品機械加工的幾種狀態(tài)下品嘗可以顯著提高具有不同數(shù)量相同成分的食品的分類性能。
為了證明上述結論,研究人員模擬人類的品嘗過程建模,測量“咀嚼”過程中食物在不同階段的味道并生成數(shù)據(jù)。咀嚼是粉碎和研磨食物的過程,其主要目的是減小食物顆粒的平均尺寸,同時,較小的顆粒也能為消化酶提供更大的表面積來發(fā)揮作用。因此,咀嚼在品嘗過程中起著非常重要的作用,研究人員設置混合器來模擬該過程。
在味道的測量上,機器人通過電導傳感器重現(xiàn)鹽的味道,鹽度會隨著離子濃度、離子遷移率和離子電荷的增加而增加。考慮到人體舌頭表面有多個感知的受體,研究人員會在實驗中多個點品嘗并將味道表示為一系列測量值,為了模仿機器人廚師咀嚼和品嘗的人類過程,研究人員將一個類似于鹽度傳感器的探針連接到機器人手臂上,傳感器就可以移動到多個位置上,該樣本的位置和數(shù)據(jù)最終生成包含味道數(shù)據(jù)的圖像。
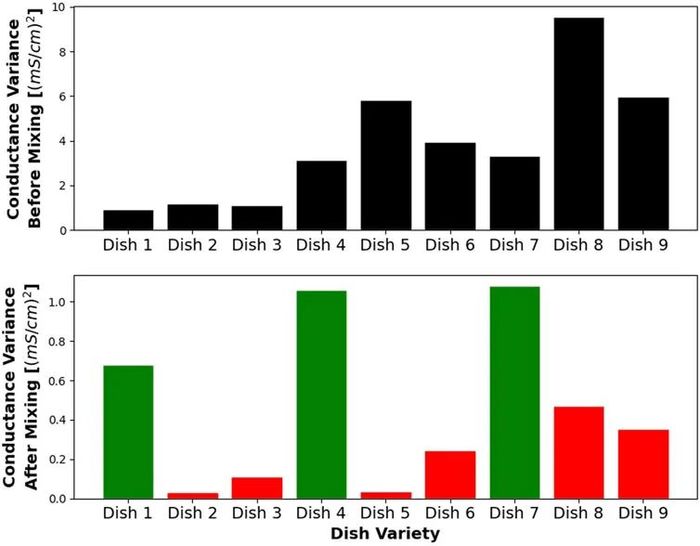
▲9道菜混合前后鹽度測量值的差異
研究人員準備了9種鹽度和西紅柿含量不等的西紅柿炒雞蛋,隨后機器人使用探針來“品嘗”菜肴,并在幾秒鐘內(nèi)返回讀數(shù)。該讀數(shù)也就作為味道的數(shù)據(jù)信息來生成圖像。該圖像基于2個參數(shù),分別是測試點的數(shù)量和盤子大小,測試點呈正方形網(wǎng)格分布。
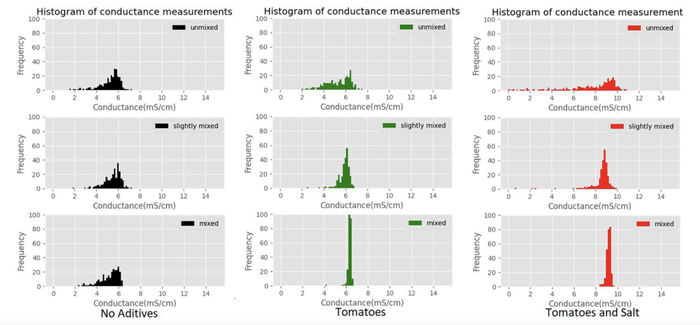
▲不同混合階段中不同添加劑菜品的電導測量直方圖。
實驗過程中,混合過程是無法控制每道菜都完全相同的,因此,研究人員在實驗過程中會讓機器人對每道菜品嘗3次,但研究人員只使用第一次和最后一次品嘗進行分類,以提高實驗的可重復性。
第一次品嘗是在未混合的食物上進行的,然后,機器人將樣品混合幾秒鐘并再次品嘗,此測量僅用于可視化。最后機器人在最大RPM下再混合60秒后,再次品嘗這道菜,咀嚼不同時刻產(chǎn)生不同讀數(shù)進一步豐富味覺圖的數(shù)據(jù)信息。
03.未混合食材鹽度差距明顯但無法分辨同質化樣本
從實驗生成的味覺圖中可以看出,未混合的樣品會顯示出非常明顯的電導率降低區(qū)域,也就是沒有鹽的地方,這些區(qū)域會和雞蛋之間存在非常清晰的邊界。最后一個樣本的數(shù)據(jù)電導分布則相對均勻,其電導值介于番茄和雞蛋的電導之間。
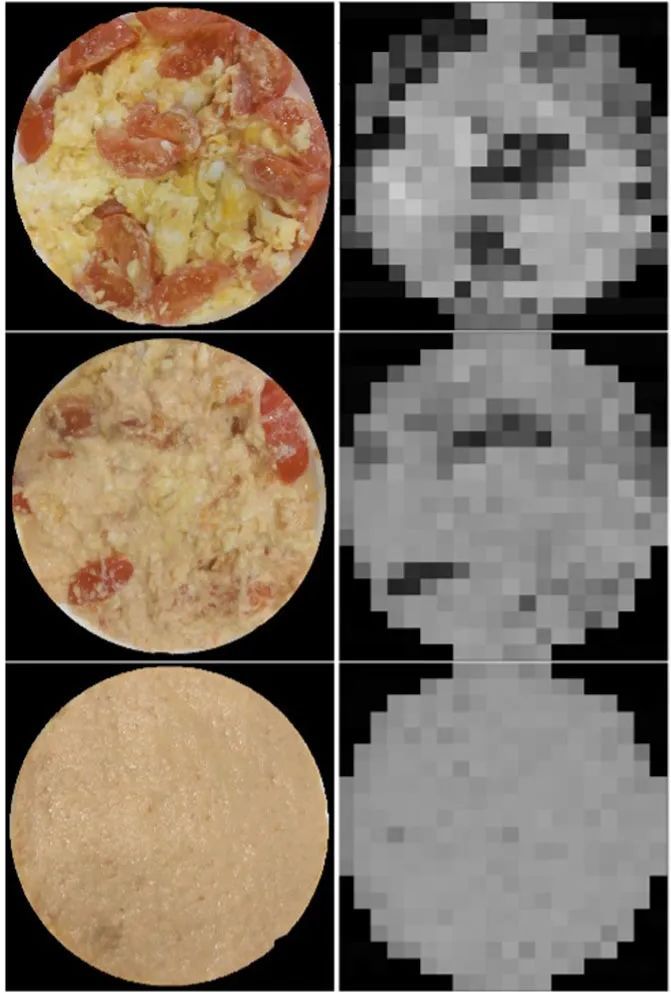
▲同一道西紅柿炒雞蛋在三個不同混合階段后的味道映射
研究人員稱,咀嚼的每個階段都會產(chǎn)生明顯不同的味道數(shù)據(jù),這也為實驗提供了額外的信息。根據(jù)這項研究,與其他電子品嘗方法相比,機器人評估咸味的能力有了顯著提高,這些方法通常很耗時,而且只能提供一次讀數(shù)。
研究人員表示,通過模仿人類咀嚼和品嘗的過程,機器人最終將能夠生產(chǎn)人類喜歡的食物,并且可以根據(jù)個人口味進行調整。Abdulali說:“在我們的實驗中,機器人可以‘看到’食物被咀嚼時的差異,從而提高了它的味覺能力。”與該項目合作的家用電器制造商Beko的高級科學家Muhammad Chughtai說:“我們相信機器人廚師的發(fā)展將在未來繁忙的家庭和輔助生活家庭中發(fā)揮重要作用。
這個結果是機器人烹飪的一次飛躍,通過使用機器和深度學習算法,咀嚼將幫助機器人廚師根據(jù)不同的菜肴和用戶調整口味。”即使一些實驗結果看起來很直觀,但在一些同質化樣本下,該裝置的表現(xiàn)較差。事實上,混合不同量的鹽和西紅柿最終會產(chǎn)生相同的平均鹽度,由于傳感器的特定結構,它并不能區(qū)分具有相同化學成分的2道菜。此外,菜品的溫度、菜品是固態(tài)或液態(tài)等都會影響機器人在烹飪中的品嘗過程。
04.結語:機器人自動化烹飪需對照人類味覺
此前,機器人的應用通常集中于流程化、固定化的工序任務中,“品嘗”這一任務往往充滿了極大的不確定性,不同人們因自身特點不同,也會對食物味道產(chǎn)生不同的感受,足以證明機器人自動化在烹飪領域的難度。
再加上人類在品嘗過程中會受唾液中化學成分的影響以及食物溫度、個人喜好等,因此研究人員稱,未來的工作將對唾液的研究,可能會為機器人增加人類唾液中存在的脂肪酶和淀粉酶的化學試劑。
機器人自動化在烹飪領域的研究還存在不足,但將味道等信息變成可視化的數(shù)據(jù)能夠推動研究進一步深入。研究人員稱,他們將依照此次分類數(shù)據(jù)建立一個規(guī)范,作為比較機器人味覺與人類味覺心理物理學研究的基準,并繼續(xù)擴展這一概念在未來的延伸。
來源:Frontiers in Robotics &AI、彭博社