

文 | 表外表里 張冉冉 薛程鵬
編輯 | 曹賓玲 付曉玲
在特斯拉智駕團隊工作區,工程師們安裝了一臺85英寸的大型電視,上面實時顯示著汽車在無干預狀態下行駛的里程數,時刻提醒大家“努力奮斗”。
他們還在旁邊擺了一面鑼,每次克服了干預問題,就敲鑼慶祝。
讓馬斯克團隊如此全力以赴的,正是后來轟動一時的FSD v12自動駕駛系統。它采用one model端對端架構,可以讓智能駕駛無限接近真人,也被稱為汽車界的“ChatGPT時刻”。
然而,這項特斯拉燃燒激情、奮戰15個月才完成的劃時代成就,被理想短短6個月就“完美copy”了——10月下旬,理想在所有MAX車型上全量推送了“端到端+VLM”系統。
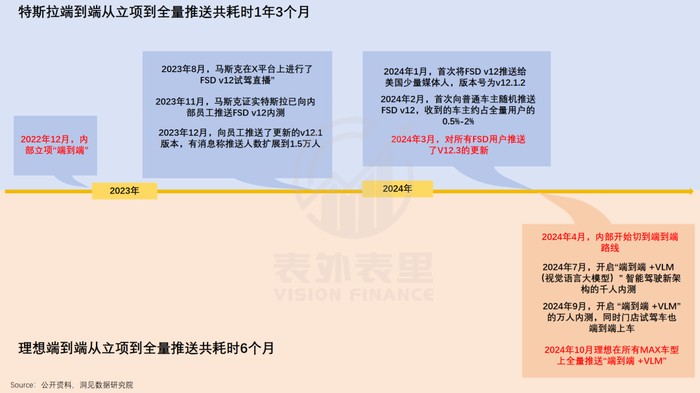
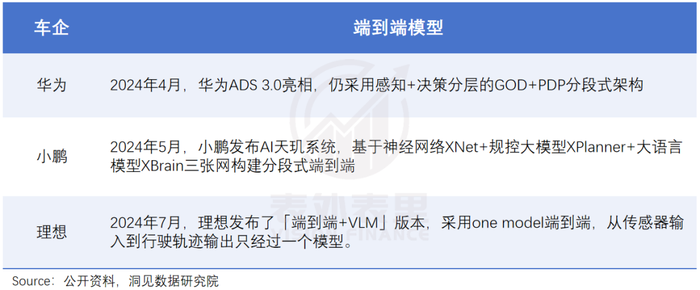
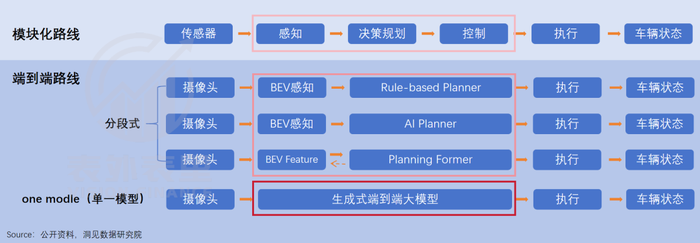
不僅提前交卷,成績還壓了優等生小鵬、華為們一頭:理想直接對標特斯拉,而智駕“遙遙領先”的小鵬、華為,切的是“折中”的分段式端到端。

然而,友商們并不以為然。何小鵬在采訪里含沙射影:“樓要一層一層搭,想跳躍式發展,大部分樓層會出問題。”
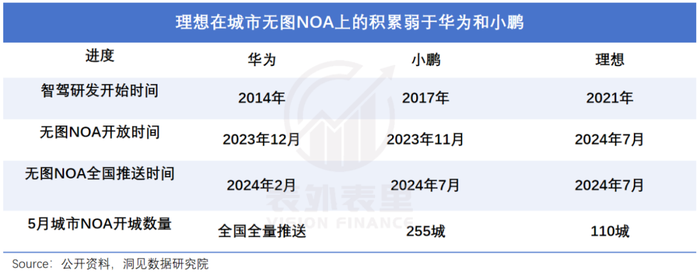
話鋒直指理想在端到端上的積累太少——算力、數據、模型等一系列要做的事情,小鵬們在研發無圖NOA等系統時就熟練掌握了,理想不僅研發時間更晚,開城數量還差了一大截。
華為余承東更是早在特斯拉FSD v12出來時,就“貼臉開大”過:one model端到端上限很高,但下限也很低,ChatGPT等AI工具存在幻覺,一次錯誤就有可能車毀人亡。
這些質疑沒錯,在汽車消費上怎么強調安全都不為過,但矛盾的是,企業發展往往又需要經常“踩油門”變道超車。
一、現在轟油門,對理想最好?
事實上,“端到端”玩家們不止路線分化,智駕團隊建設也大相徑庭。
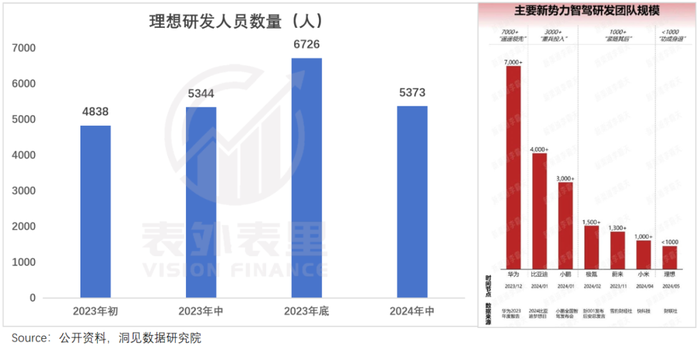
理想這邊大玩“過山車”:去年卷無圖NOA開城,剛把智駕人數擴至近千人,今年切入one model端到端后,又“一朝回到解放前”——截止到年中,縮減了40%。
而智駕團隊規模分別是理想3倍、7倍的小鵬、華為,卻似乎并沒有減員的意思,如小鵬管理層表示:“小鵬沒有去裁人,因為AI在發展早期仍然需要人類老師。”
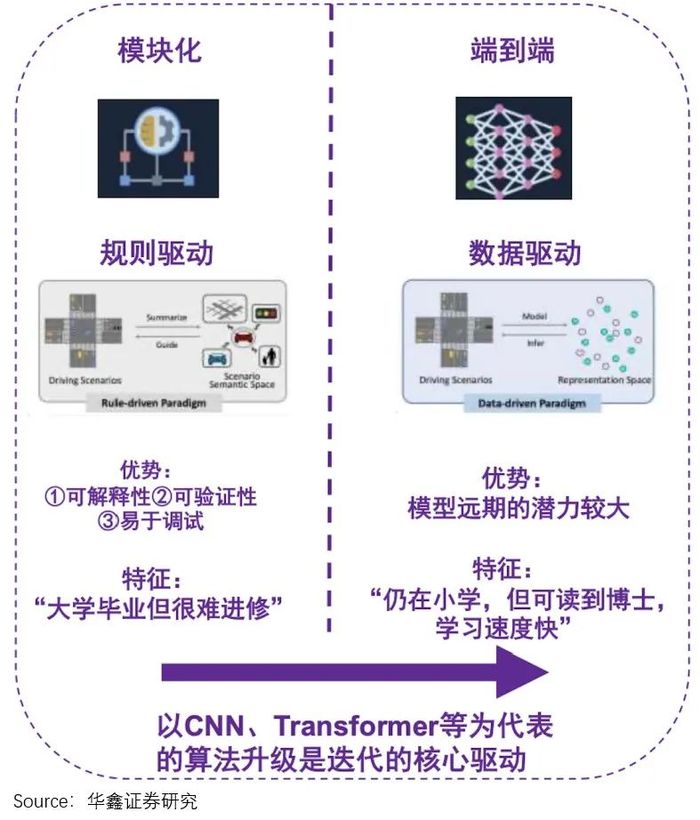
這也不難理解,畢竟one model端到端路線純數據驅動,用馬斯克的話說就是“一張神經網絡打包一切”,幾乎把過去模塊化時代積累的經驗都扔進了垃圾桶。
相比之下,華為們采取的分段式“端到端”技術方案,仍是一個人工和智能“共處”的混搭系統。
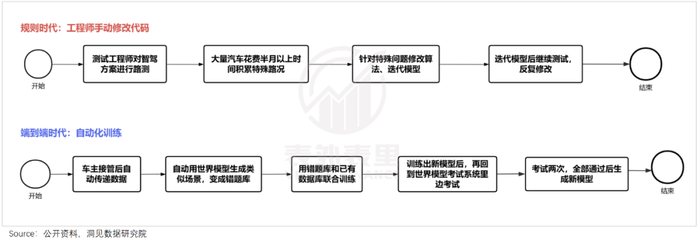
在模塊化時期,對駕駛任務的決策、執行,需要基于規則——工程師將“紅燈停、綠燈行”“見到行人要讓行”等司機駕駛的各種行為習慣,變成代碼規則,智駕系統按這些規則匹配實際情況作出反應。
而道路行駛環境復雜,疑難場景源源不斷,工程師需要夜以繼日地寫if else。比如,小鵬去年在北京測試NPG時,類似“樹葉把紅綠燈遮擋”等問題層出不窮,專項成立了幾十個,耗時2個多月后才勉強開放。
這讓彼時的智駕競爭,演變成了往規控模塊堆人力的軍備競賽。可以看到,小鵬、華為“遙遙領先”的開城數量,正是建立在分別超過3000+人、7000+人的智駕團隊規模上。
相比之下,理想則被其智駕一號位“蓋章”:人力資源不足拖累了開城進度。
如此來看,小鵬們如果直切one model端到端,意味著此前積累的規則數量大部分都將作廢,人員與組織架構調整,也牽一發而動全身。
而“光腳”的理想就不一樣了,用其管理層的話說:“雖然有技術切換的成本,有組織管理上的代價,但理想能負擔得起。”
更何況,當下上馬one model端對端,最符合理想的商業利益訴求。
如果說,模塊化設計理念下的車輛,就好像是在駕校學車的、沒有自主意識,教練說做什么他就做什么(編寫代碼規則)。
那端到端設計理念下的車輛,就是一個擁有自主意識并且會主動模仿學習的新手司機,只要給它觀看成百上千萬的優秀老司機怎么開車的視頻后,它會慢慢變成真正的老司機。
這意味著,越早、越多地掌握這些“優秀司機開車視頻”用來訓練,在這輪競爭中勝出的機會越大。
而理想早在2019年交付第一輛車開始,就學習特斯拉部署了影子模式——在車上放置攝像頭,并回傳數據。
與之相比,同期的友商們或多或少都有點“拉跨”。比如,技術、銷量都領先的特斯拉,囿于“國內數據合規性”限制,FSD一直無法引進中國,數據積累尚屬空窗期。
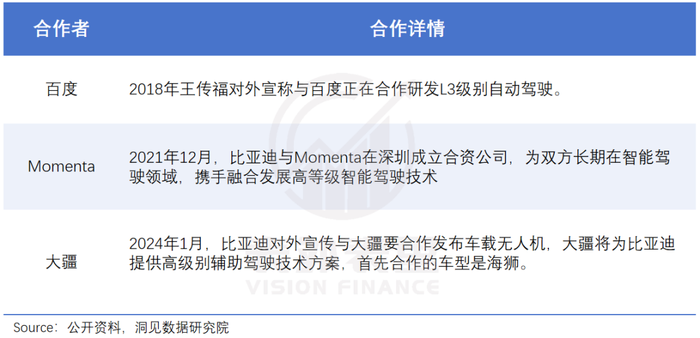
銷量巨無霸的比亞迪,智駕業務一直“外包”給百度、大疆等供應商,既不允許這些供應商用量產車型上獲得的數據,自己也沒有回傳數據的能力。
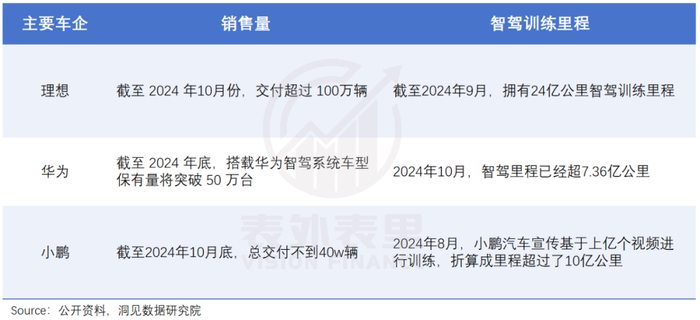
同樣有數據回傳能力的華為和小鵬,銷量又不盡人意:小鵬的總交付不到40萬輛;搭載華為智駕系統的車型,預計2024年底會突破50萬臺,都不及理想累計銷量的一半。
但這種情況,顯然不會一直持續下去。
最新消息,特斯拉計劃于2025Q1在中國和歐洲推出FSD。比亞迪去年也秀了一組數據,“目前已形成一支300多輛車的研發車隊,積累150PB以上的數據”,暗示自己也在建設數據回傳能力。
這意味著,理想如果現在不上馬one model端到端,很可能“錯過這個村,就沒了這個店。”
當然,競對們追上來,還需要過程,且數據訓練也不只是堆量,還對數據質量有要求——端到端的各個功能需要同時進行訓練,訓練數據越一致越好。
而一談起這個,理想的嘴角比AK還難壓,“外界說理想L系列是在套娃,但是這讓我們有個最大的優勢,傳感器布局和傳感器型號完全一致,理想L系列的數據可以完全復用。”

除了規模、質量,數據的多樣性也會影響大模型的學習效果。理想智駕團隊去美國試駕特斯拉FSD V12時就發現了:在西海岸硅谷和東海岸紐約,FSD性能差距大到像2個系統。
這時,以前總是被嘲“技術落后”“多此一舉”的增程式路線,又幫了理想一把:相比純電車“只能在幾百公里打轉”,理想汽車的足跡深入新疆、西藏等地。
于是,在“鞭子”加“胡蘿卜”的雙重刺激下,理想開啟了狂奔。
二、1年多時間,補了特斯拉3年的課
去年10月開始研發無圖,3個月后從研發轉向量產交付,次月就交付了初版……短短幾個月,理想就完成了友商一兩年的工作。
如此瘋狂,就是為了“給端到端爭取時間”。
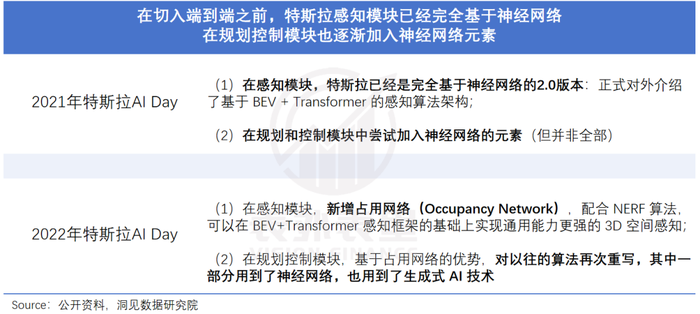
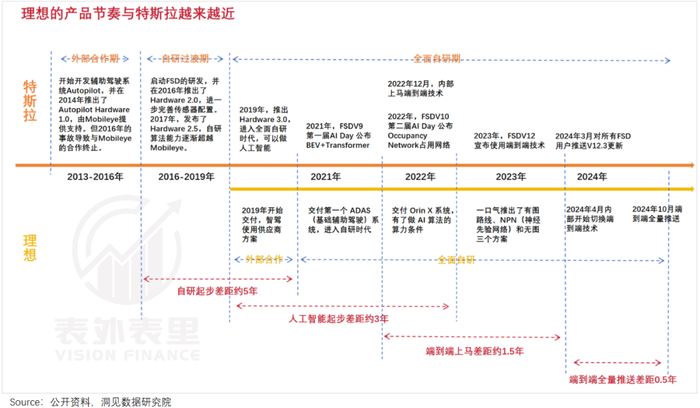
端到端需要的算力、數據、模型等一系列事情,無圖智駕方案基本都會涉及,正如特斯拉能快速落地FSD v12,背后是其早早就舉起了純視覺方案的大旗,并逐漸在規劃和控制模塊也加入神經網絡。
有了特斯拉在前面探路,還有自己數據優勢傍身,理想跑得更快更猛:無圖方案從測試到全量推送,只花了5個月時間,到了端到端,這一時間被縮短至3個月。
橫向對比來看,特斯拉從無圖到端到端全量推送,大約經歷了3年,而理想僅僅花了1年多時間就補完了作業。
“2024年要成為智駕絕對頭部。”這是李想立下的flag,如今理想正朝著這個目標步步逼近。
但在其風頭日盛時,何小鵬卻兜頭潑來一瓢冷水:“如果有人說他有一個大模型,可以用來降維做智能駕駛,或者他說有很多車,所以有很多數據,千萬不要相信,絕對是胡扯。”
這并非何小鵬的一家之言,馬斯克也有類似說法:大多數的數據最終都會被丟掉,重要的是那些占比不到1%的稀有視頻,比如一些奇怪或者車流量異常大的十字路口的數據。
甚至理想自己也是如此——其建立了一套“老司機”的評價標準,只有不到3%的車主通過了考核,連智駕負責人都沒達標。
也就是說,能夠投喂給大模型的優質數據其實鳳毛麟角。而理想積累的數據雖然“拳打”問界、“腳踢”小鵬,相比特斯拉卻仍有較大差距:
從銷量來看,截至2023年底,特斯拉在北美累計交付約250萬輛,而理想到今年10月在國內累計交付100萬輛;
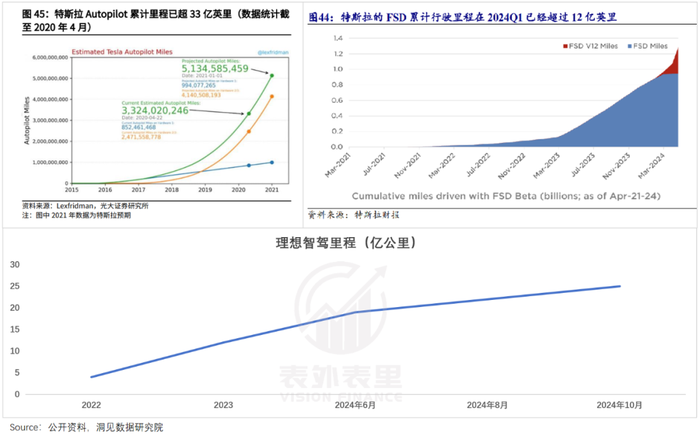
智駕里程積累上,特斯拉在全量推送FSD V12前,累計智駕里程超過70億英里,而理想的這一數據是25億公里,剛過特斯拉的1/5。
這使得理想訓練的優質數據量也遠少于特斯拉:據《馬斯克傳》,FSD V12在2023年初切入端到端時就分析了1000萬個視頻畫面,而理想在全量推送前訓練的視頻僅為400萬個。
乍一看,400萬個也不少,但當車子真正開到路上,問題就凸顯出來了。
如下圖,理想智駕明顯學會了“早八老司機”的蛇形走位,不僅絲滑加塞,甚至還彈窗提醒車主幫忙加塞。

實際上,即使是有著驚艷擬人化表現的FSD,也會在馬斯克的直播間里,當著1000萬觀眾的面企圖闖紅燈。
這是因為one model端到端下,數據傳進來和軌跡輸出去之間,只有一個生成式大模型,它并不知道紅綠燈是什么,只有在學習了海量司機駕駛視頻之后,才知道紅燈停、綠燈行。
而在大模型“學習”的過程中,難免會犯各種各樣的錯誤,正如上述余承東所說的,“one model下限很低。”
理想目前的解題思路是在one model端到端模型之外,并聯一個視覺語言模型(VLM)托底。
例如,遇到坑洼不平的路面或潮汐車道時,后者會提醒前者降速、合理選擇車道;遇到危險時,兩個系統能一起幫司機踩剎車。

在此之外,理想還祭出了一個簡單粗暴的方法——讓更多人用智駕,積累更多數據。
其智駕負責人曾透露端到端的落地流程:先內部驗證范式,到產品驗收環節,從鳥蛋到早鳥到千人內測,我們讓用戶一起去做產品的測試和迭代。
在內測版本,理想就直接加入了高難度的高速場景,相比之下,特斯拉首次全量推送的FSD V12也僅適用于城市街道,高速路段在V12.5才推送。

從這一維度上看,理想多少有些著急了。但“急”不止發生在理想身上,切入端到端路線的玩家,沒有哪個敢放慢步伐。
“特斯拉今年將在綜合訓練和推理AI上投入約 100 億美元。”這是馬斯克分享的數據,他還表示,“任何沒有在這個水平上投入且資金效率不高的公司,都無法競爭。”
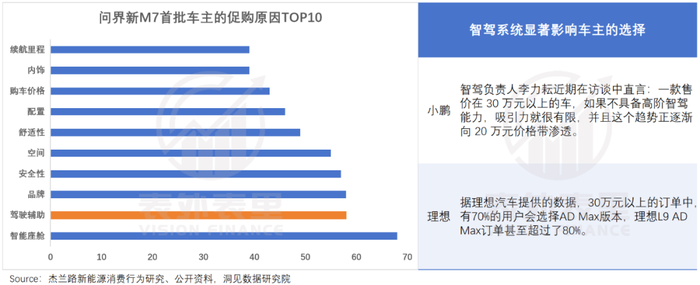
這意味著,車企需要有足夠的銷量去獲取利潤。而在智駕水平顯著影響購車選擇的當下,越早落地技術,越能搶奪用戶心智,促進銷量增長,特別是在智駕接受度較高的中國。
基于此,理想選擇了繼續轟油門。幾個月前,李想公開表示要推出更高算力的自動駕駛體系,讓用戶享受“L3級自動駕駛體驗”。
小結
據傳,理想智駕部門很喜歡以希臘神話為“關鍵戰役”命名,而這一次的端到端項目,被叫作“達摩克里斯計劃”。
按照理想的說法,“這個項目有挑戰、很危險,如果做不好,達摩克里斯之劍會掉下來。”
很顯然,理想比任何人都清楚,從奶爸車到智駕黑馬的“一躍”,代價不僅是招兵買馬、訓練模型的開銷,還有坐在駕駛位上的百萬車主們。
接下來的路,理想也得系好安全帶才行。