
文|產業象限 錢江
編輯丨山茶
臉有什么用嗎?在我們的社會中,“臉”幾乎是人與人之間互相識別的第一標簽。
但除此之外,“臉”在我們生活中還承擔著一些其他意義:比如刷臉支付,臉會是我們確認支付的許可;比如門禁識別,臉是我們在許多地方暢通無阻的保證。甚至許多時候我們會氣憤地質問別人,你要臉嗎?這個這個時候,臉還會包含尊嚴、道德、責任等許多無形的價值觀念。
顯而易見,臉幾乎是作為的人最重要的特征。以至于當元宇宙熱潮來臨,人們需要從一個世界進入一個世界時,要做的第一件事,也是給自己捏一張“臉”。
但一個有意思的現象是,在人形機器人蓬勃發展的當下,這個致力于模仿人類形象的事物,卻幾乎從來沒有被認真討論過它的臉應該長成什么樣。人形機器人不需要臉嗎?還是說當前的技術條件,這個話題還不應該被討論?如果一定要給機器人一張臉的話,這張臉又應該怎么做?
機器人不要“臉”人才要“臉”
人形機器人要不要臉,答案是顯而易見的。回顧記憶中那些令人印象深刻的機器人,無論是《變形金剛》里的大黃蜂、擎天柱,還是鳥山明筆下的阿拉蕾,亦或是獨自在地球上撿垃圾的瓦力,幾乎都有一張生動而鮮明的臉。但最早的時候,人形機器人要“臉”這件事情是被忽略的。
波士頓動力前CEO Marc Raibert早期就認為,人形機器人“功能就是一切”,“能力、靈巧、感知和智力才是機器人的關鍵功能,其它的都不重要”。所以在2024年電動版Atlas發布之前,波士頓動力的機器人幾乎都沒有明顯的臉部特征。
Marc Raibert轉變理念是在2021年,波士頓動力液壓版Atlas的一則互動視頻“Do You Love Me”在網上出圈。這讓Marc Raibert意識到,形態的美感可以對機器人的仿生動作帶來加成效果,而臉部是形態美最重要的一個特征。
同樣是在2021年,這一理念被另一家機器人公司所印證。這一年,英國機器人制造商Engineered Arts發布了一款名叫Ameca的人形機器人并且迅速出圈,原因就是因為Ameca擁有逼真的面部表情。與Marc Raibert不同,Ameca的創造者Will Jackson認為:“人臉是我們擁有的具有最高帶寬的通信工具”,一個表情所能傳達的信息要遠多于聲音和肢體。
Ameca的出圈,也側面證明了大眾其實更喜愛一個表情豐富、有溫度、會表達情感的伙伴,而不是一個空有力氣的鐵疙瘩。2009年的一部科幻電影《Moon》也在講述一個同樣的故事。電影中,男主Sam Bell常常向他的機器人工作伙伴Gerty傾訴心聲,Gerty總能一邊回答一邊給出動畫表情來對Sam的遭遇表示同情。
Gerty的本質是一串計算機符號,而這張臉將冰冷的數學運算幻化抽象為平易近人的表情,不僅在言語上安慰了Sam,更是通過視覺交流拉近了人機關系。
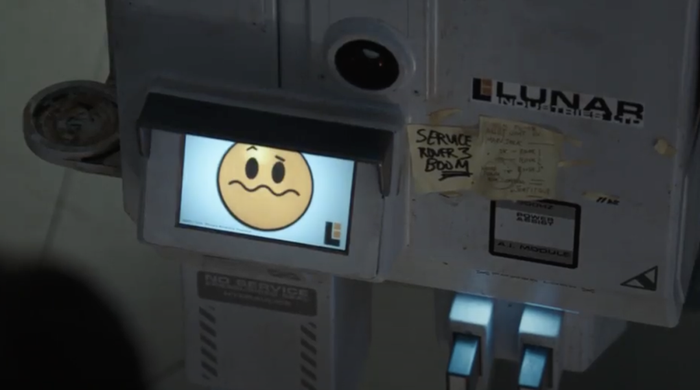
▲圖源:《Moon》電影
顯而易見,與機器人相比,人類其實更需要機器人擁有一張臉。只是如何去實現這張臉,目前行業里還沒有一個統一的答案。
目前,主流機器人公司在設計面部時主要采用兩種策略:一種是基于集體文化共識,選擇中立和抽象的圖像,通過符號化的情感傳達來滿足人類對情感表達的基本需求,以捕捉和傳遞情感的本質。
另一種則是追求極致的逼真度,努力再現人類面部的細節,試圖通過接近現實的人類面貌來實現更深層次的情感共鳴和互動。但這兩種方案的落地,卻都面臨許多挑戰。
人形機器人,讓臉譜符號化
現實中,一款合格的人形機器人,頭部需要具備耐用性、抗沖擊能力,以適應多樣化的操作環境和任務。
因此,包括特斯拉的擎天柱、Figure01、波士頓動力的Atlas等人形機器人在內,其頭部使用的基本是金屬合金和高強度塑料。而在這樣一個“硬邦邦”的頭部,安裝一張靈動、表情自然的臉并不容易。所以當前主流的人形機器人并沒有對面部表情做精致的研究設計,而是采用類似Gerty這種抽象的“動畫臉”或“卡通臉”。畢竟這樣的臉龐幾乎能被所有種族的人接受,并且更容易構建。

▲圖:主流人形機器人面部設計 產業象限制圖
「產業象限」梳理了目前幾家主流的人形機器人的臉部形象,可以看到它們面部清一色地使用“頭盔式”的“玻璃面罩”,面罩里內置攝像頭或使用LED燈帶鑲邊。比如,仔細觀察智元機器人,會發現它在操作礦泉水瓶的時候,表情是微笑的:

宇樹新近發布的最新一代人形機器人直接使用凹陷的屏幕面部設計,其頂部配置有攝像頭等組件,圍繞臉部的藍色弧光像是一種微笑。

Figure 01機器人借助搭建OpenAI的能力構建大腦,所以它的面部也帶有明顯的OpenAI特色,即它每一次和人類交流,面部都會出現ChatGPT特有的“思考”符號。

波士頓動力的電動版Atlas采用光圈設計,這種設計參考了皮克斯電影開頭的臺燈,其內部配置了三個攝像頭。波士頓創始人Marc Raibert在設計Atlas的頭部時,并不希望它有類似人類的面孔,因為這會觸發“恐怖谷”效應,可能有點反烏托邦。Marc Raibert覺得對于一個人形機器人來說,只要能保持與人類基本的交流即可。但這種圓環的設計,雖然沒有五官,卻總覺得這張“臉”自帶情愫。

特斯拉的擎天柱如今已進化到第二代,但面部依舊一片漆黑,馬斯克鮮少提及擎天柱面部的設計邏輯。
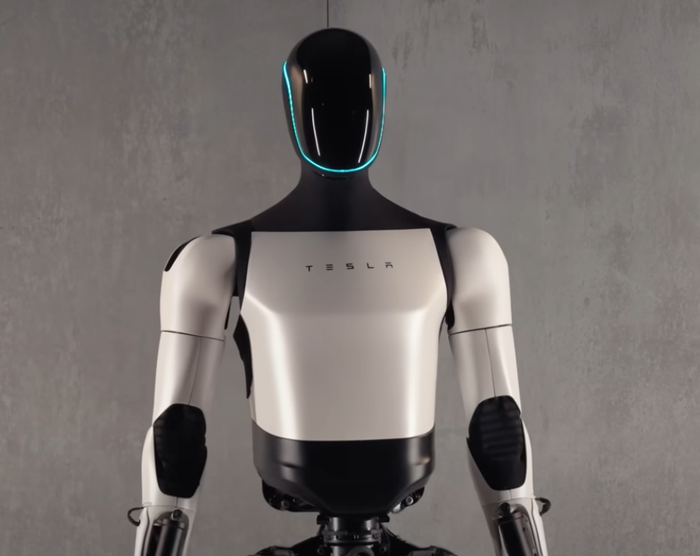
清一色的“黑面騎士”背后也有共同的光學和美學邏輯。黑色被視為現代、簡潔和高科技的象征,公眾易于接受的同時,也不乏科技感和未來感。
目前包括蘋果、特斯拉在內的科技公司,都偏愛在發布會上使用“高級黑”作為底色。較暗的面罩則有利于突出機器人的眼睛和其它面部特征,讓信息在不同條件和不同角度中都能被清晰辨識。
此外,黑色面罩還可以有效遮蓋和保護面部的各種傳感器和顯示屏,防止外界光線的干擾。但這般高科技感的“鋼鐵美學”,顯然無法在與人類互動時,充分滿足情感交流的需求,冰冷的機器感,令人形機器人喪失了“人形”應該具有的一點柔性和“人性”。所以一直以來,企業和科學家也仍然在為做一張無限逼近人類的的機器人臉而努力。
機器人,也可以“畫皮”?
抽象派為了文化共性,曾嘗試在機器人上采用經過修飾的動物臉或卡通臉,但它們無法傳遞復雜的情感細節,限制了機器人在諸如醫療、教育領域等情感交流高需求的場景下的應用。所以追求和真人一比一還原的“逼真臉”就成為一個不得不發展的技術路線。
“逼真臉”有兩個陣營,一種是依賴機器學習做表情控制的“自主機器人”,另一種是依賴操作員遠程操作的“遠程控制機器人”。它們的核心差異,是交互的“自主性”來源于機器還是人類。
2005年11月,世界上第一個具有表情的人臉行走雙足機器人Albert HUBO亮相。一年之后,第一個被授予沙特阿拉伯公民身份的機器人Sophia誕生,它能夠模仿62種面部表情。
其原型融合了古埃及女王娜芙蒂蒂、奧黛麗赫本和這家機器人創始人David Hanson的妻子阿曼達·漢森。這兩款表情機器人都隸屬于同一家名叫Hanson Robotics的公司。
其頭部使用的都是“Fubber”材料,它是具有高彈性和柔韌性的橡膠材料,可以產生皺紋與折痕,貼近皮膚,他們也幾乎是最早一批有逼真臉的“自主機器人”。
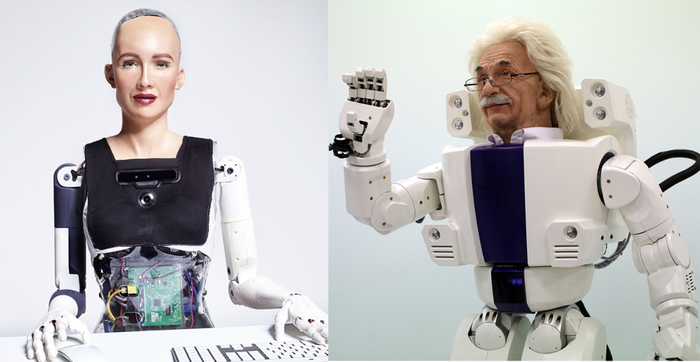
▲圖:Sophia機器人Hanson Robotics(左);Albert HUBO機器人Hanson Robotics(右)
Albert HUBO使用復雜的控制算法來實現面部表情和肢體運動的協調。其控制系統能夠自主管理基本動作和表情,但需要人類預先編程和設定參數。Sophia具備一定的學習能力,使用自然語言處理、計算機視覺和機器學習算法來理解和回應人類對話,可以通過與人類的互動不斷改進其反應和行為,她的“大腦”運行在Hanson Robotics基于云的人工智能 (AI) ——MindCloud上。
前面曾提到的Engineered Arts也醉心于做逼真的人形機器人臉。旗下最知名的機器人是Ameca使用復雜的傳感器和伺服電機,通過結合計算機視覺和自然語言處理,能夠理解和回應用戶的指令和情感。據稱,Ameca的面部使用的是Engineered Arts開發的一種專有材料,具有高度的彈性和柔韌性,以支持復雜的面部表情和自然的運動。

▲圖:機器人Ameca,Engineered Arts
在中國,EX集團擅長做機器人面部表情,其曾推出還原魯迅形象的人形機器人人。EX集團創始人李博陽曾在接受采訪時提到,大多數人形機器人公司都更關注機器人的雙足這類“腰部以下”的位置,腰部以下主要在于處理好平衡控制的問題,而腰部以上更多與AI所結合的智能決策等相關。EX集團“主要布局腰部以上的方向,核心產品是仿生人形機器人”,“
不論是Albert HUBO、Sophia還是Ameca,他們探索的自主學習機器人的臉都非常具體,按照如愛因斯坦這樣的名人或融合真人臉龐創造一張新臉,但這些機器人的硬件都是專有的,Hanson Robotics和Engineered Arts之外的組織的研究人員無法使用這些類人機器人進行自己的研究,他們不得不重新構建新的逼真的類人機器人作為研究對象。
為了解決這類問題,研究人員嘗試做了一款開源機器人Eva,通過Eva的相關研究,類人機器人面部表情的生成過程也浮現在大眾眼前。
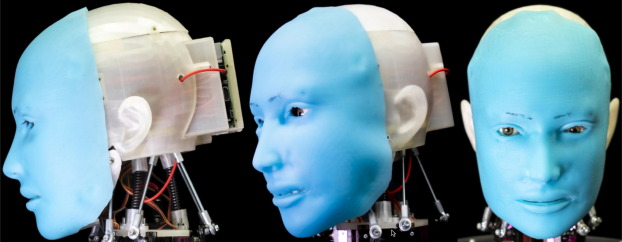
▲圖:Eva,Expressive humanoid robot face
Eva由四個部分組成:面罩驅動機構、下頜、眼睛和頸部,其中,面罩驅動機構主導著Eva的面部表情生成。Eva的表情生成主要由兩部分主導——先是由伺服電機驅動面罩上的表情單元,再由面罩上的鋼絲將驅動力傳導給硅膠面罩,從而形成Eva的表情。
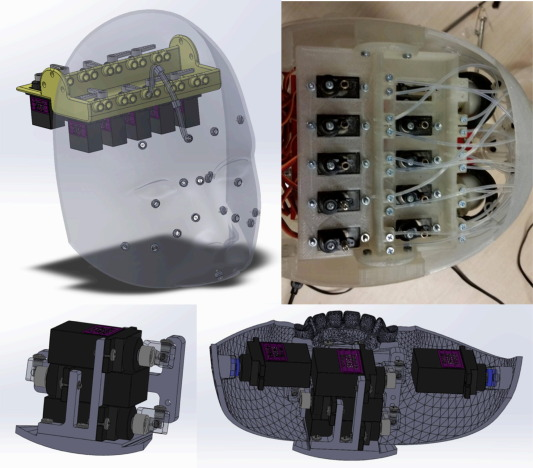
▲圖:Eva,Expressive humanoid robot face
如圖中所示,面罩驅動機構的組成部分有12個MG90S伺服電機、一個定制硅膠面罩、一個支撐面罩的3D打印頭骨和鋼絲。每根鋼絲的一端連接相應伺服電機的伺服喇叭,另一端連接面罩上的某個點,鋼絲連接的點基本在面罩左右兩側呈現對稱,確保Eva做出面部表情時,面罩兩側都會被驅動。
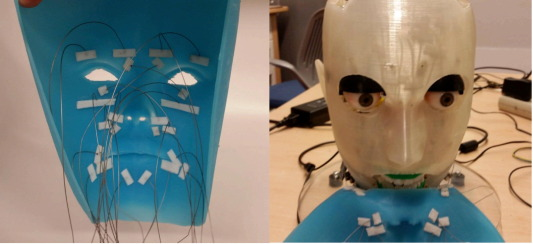
▲圖:Eva的硅膠面罩,Expressive humanoid robot face
鋼絲主要通過布條和粘合劑附在硅膠面罩內表面,硅膠面罩由Smooth-On EcoFlex 00-30制成,這種材料與人體皮膚的材料特性非常相似。
根據著名心理學家、面部表情研究的先驅保羅·艾克曼的說法,所有面部表情都可以與憤怒、厭惡、恐懼、喜悅、悲傷和驚訝這6種基本情緒聯系起來,Eva的表情設計也以這6種為主。每一種表情都對應著面部肌肉的特定運動,比如驚訝對應著眉毛向上的運動,喜悅對應著嘴角向上。
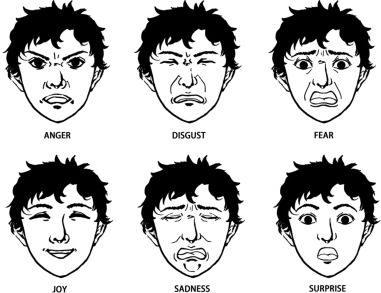
▲圖:保羅·艾克曼假設的六種基本情緒,Boyuan Chen
Eva的開發者對人類所有面部表情進行分類,建立46個不同的表情動作單元,比如,驚喜可以從AU 1、2、5和26中重現。
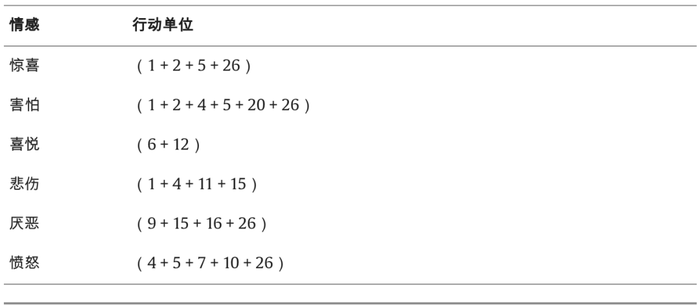
▲圖:情緒-AU 對應關系,Expressive humanoid robot face
不論是自主機器人,還是遠程操控機器人,他們的面部表情驅動方式基本都與Eva的運作邏輯類似。即使用伺服電機完成表情驅動。但自主機器學習的機器人,可能會帶來不可預測的行為,并且其仿生相似度很大程度上取決于機器學習模擬人類的智慧和情感技術的成熟度。為了解決這個問題,于是有了基于人類操作做精確控制的遠程操控機器人,嘗試彌補自主學習機器人的不足之處。
大阪大學教授石黑浩和日本動畫公司Kokoro共同研發出Geminoid——石浩黑的“復制品”,這臺高度仿生機器人可以被電腦遠程操控,實現模仿石黑浩的行為和面部及頭部動作,Geminoid身上有多個執行器,面部有13個、軀干15個、手臂和腿部22個。
根據石黑浩的體驗,他認為擁有和自己長得一樣的克隆體,最主要的用途在于可以讓它做自己的分身,他曾在報道中提到,機器人是自己身體的延伸。
但從Geminoid相關表現來看,它的表情并不自然,比如它在與工作人員交流時,眼神空洞、雙手僵硬,與真人有較為明顯的區分。不論是自主學習機器人還是遠程操控機器人,即便臉無限逼近人類,但如何在一顰一笑之間依舊保持逼真,至今也沒有一個完美的方案。即便面部表情無限類人,手部、身體不夠與人類相似,依舊跨不過“恐怖谷”效應。
結語
人類的壽命有限,可能正因如此,他們對追求另一種讓生命可能得以延續的方式十分執著。
制作無限類人的人形機器人,或許能夠彌補一部分的缺憾,但“滿足感”和“遺憾感”似乎是一對遵循能量守恒定律的雙生火焰,它們會一直并存,滿足一種需求的同時,又會誕生另一種遺憾。
人形機器人需要有一張臉,但人類的面部的結構極其復雜,涉及骨骼、肌肉、皮膚、神經和血管等多個層次,其中面部有40多塊肌肉,覆蓋在肌肉之上的皮膚具有彈性和伸縮性,能跟隨表情做實時的變化。隨著技術進步,對人臉構造所涉及的物理設備會越來越逼真,牽動肌肉的若干個伺服電機也會配合得越來越熟練。
但是,人類面部有一雙通往心靈的眼睛,它映射著人生閱歷,通過雙眼,可以捕捉人所經歷的滄桑與喜哀,而這是機器人難以擁有的,即便算法再高級,也很難復制和代替人類的心境。
- END -
參考資料:https://www.sciencedirect.com/science/article/pii/S2468067220300262